1. 前言
- 本课程由数学系开设,旨在讲述求解数学问题的各种最优化方法。
- 本博客仅对课程中的如下内容进行详细介绍:
- 凸集、凸函数、凸规划
- 线性规划
- 线性规划标准形式
- 单纯形法
- 无约束最优化方法
- 最优性条件
- 最速下降法
- 牛顿法
- 约束最优化方法
- Kuhn-Tucker 条件
- 罚函数法
- 闸函数法
2. 凸集、凸函数、凸规划
2.1 凸集
- 凸集的定义:
- 设(S subseteq mathbf { R } ^ { n }),若(forall x ^ { ( 1 ) } , x ^ { ( 2 ) } in S , lambda in [ 0,1 ]),必有(lambda x ^ { ( 1 ) } + ( 1 - lambda ) x ^ { ( 2 ) } in S),则称(S)为凸集。
- 形式化理解凸集的定义,即集合中任意两点连线上的点都在集合内。
- 对于凸集的证明,往往利用定义进行证明。
2.2 凸函数
- 凸函数的定义:
- 设集合(S subseteq mathbf { R } ^ { n })为凸集,函数(f : S ightarrow mathbf { R })。若(forall x ^ { ( 1 ) } , x ^ { ( 2 ) } in S , lambda in ( 0,1 )),恒有(f left( x ^ { ( 1 ) } + ( 1 - lambda ) x ^ { ( 2 ) } ight) leq lambda f left( x ^ { ( 1 ) } ight) + ( 1 - lambda ) f left( x ^ { ( 2 ) } ight)),则称(f)为凸集(S)上的凸函数。
- 如果上面不等式以严格不等式成立,则称(f(x))为凸集(S)上的严格凸函数。
- 凸函数的证明:
- 凸函数与一阶特征、二阶特征互为充要条件,往往利用二阶特征进行证明,
- 二阶特征:
- (f)在(S)上凸,等价于,(S)中任意一点,其对应的海塞矩阵半正定。
- (f)在(S)上严格凸,等价于,(S)中任意一点,其对应的海塞矩阵正定。
- 凸函数是定义在凸集上的函数,如果要证明凸函数,首先要说明定义域为凸集。
2.3 凸规划
- 凸规划的定义:
- 如果问题((fS))中,(S)为凸集,(f)为凸函数,则称这个问题是凸规划。
- 凸规划的定理:
- 在凸规划问题中,局部最优解也是全局最优解。
- 如果(f)为严格凸函数,则该局部最优解是唯一全局最优解。
- 依据凸规划的定理,证明一个局部最优点为唯一全局最优解,只需证明函数(f)为严格凸函数。
- 凸规划的性质十分利于我们寻找问题的最优解,因此我们经常需要证明一个问题是凸规划问题。
3. 线性规划
3.1 线性规划标准形式
- 首先介绍线性规划的标准形式,之后的单纯形法都是在标准形式上进行计算,对于不是标准形式的线性规划需要对其进行转换。
- 标准形式如下:
[( L P )left{ egin{array} { c } { operatorname { max } z=c ^ { T } x } \ {s.t. quad Ax = b } \ {quad quad x geq 0 } end{array}
ight.
]
- 四个特点:
- 目标最大化
- 约束为等式
- 决策变量非负
- 右端项非负
- 采用如下方式,将一般形式转化为标准化形式:
- 极小化目标函数的问题:利用负号转化为目标最大化
- 约束不是等式的问题:引入松弛变量
- 变量无符号限制的问题:用两个非负变量之差来表示一个无符号限制的变量
- 右端项有负值的问题:乘以(-1)
3.2 单纯形法
- 单纯形法的基本思路是有选择地取基本可行解,即是从可行域的一个极点出发,沿着可行域的边界移到另一个相邻的极点,要求新极点的目标函数值不比原目标函数值差。
- 单纯形法要求系数矩阵中存在单位阵,将其作为初始的基本可行解,之后一步步迭代。对于某些标准形式中不含有单位阵的线性规划问题,可以采用大M法和两阶段法。
- 单纯形法的计算比较简单,这里只给出例子进行说明。
[( L P ) quad left{ egin{array} { c } { operatorname { max } z=1500x_1+2500x_2} \ { 3x_1+2x_2+x_3 = 65 } \ { 2x_1+x_2+x_4 = 40 }\ { 3x_2+x_5 = 75 }\ { x_1,x_2,x_3,x_4,x_5 geq 0 } end{array}
ight.
]
- 单纯形表如下所示:
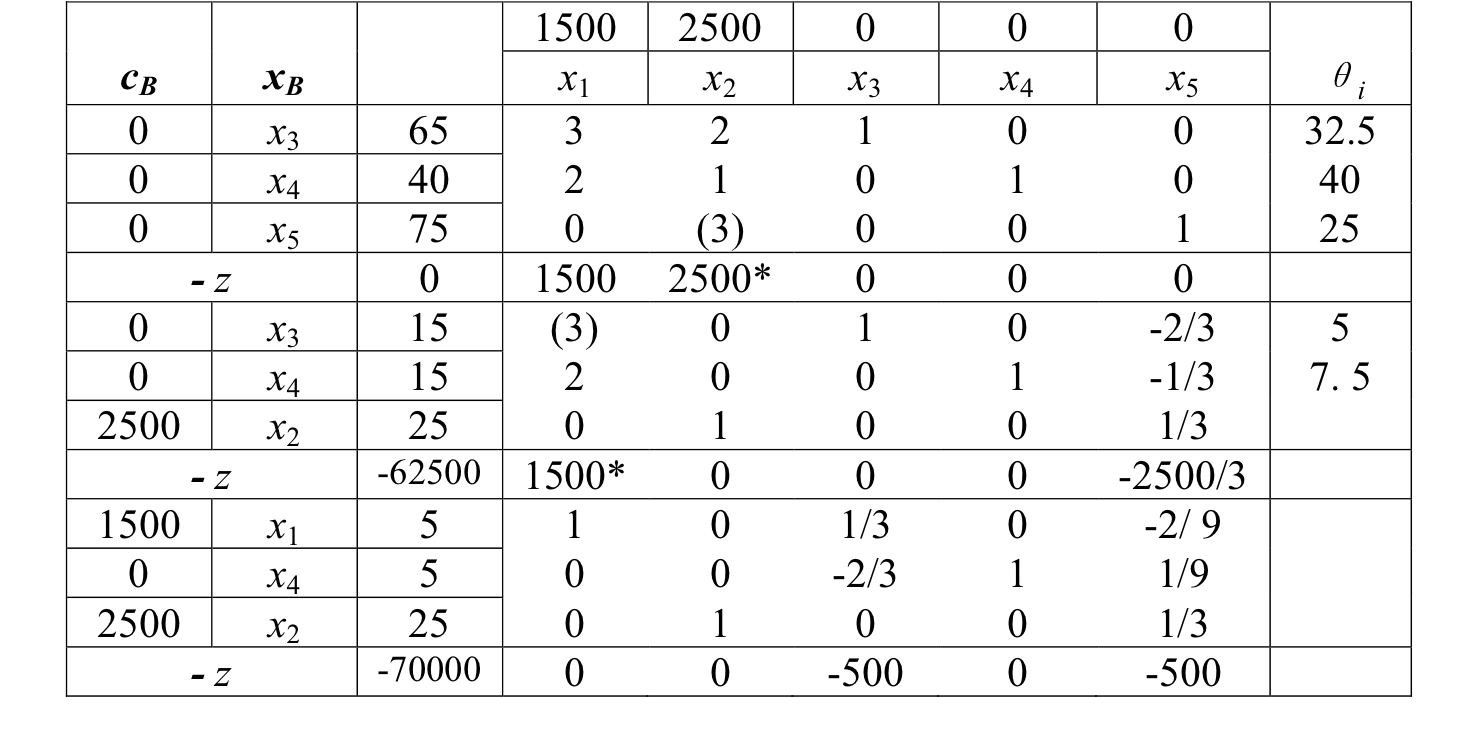
- 最优解为(x _ { 1 } = 5, x _ { 2 } = 25 , x _ { 4 } = 5)。
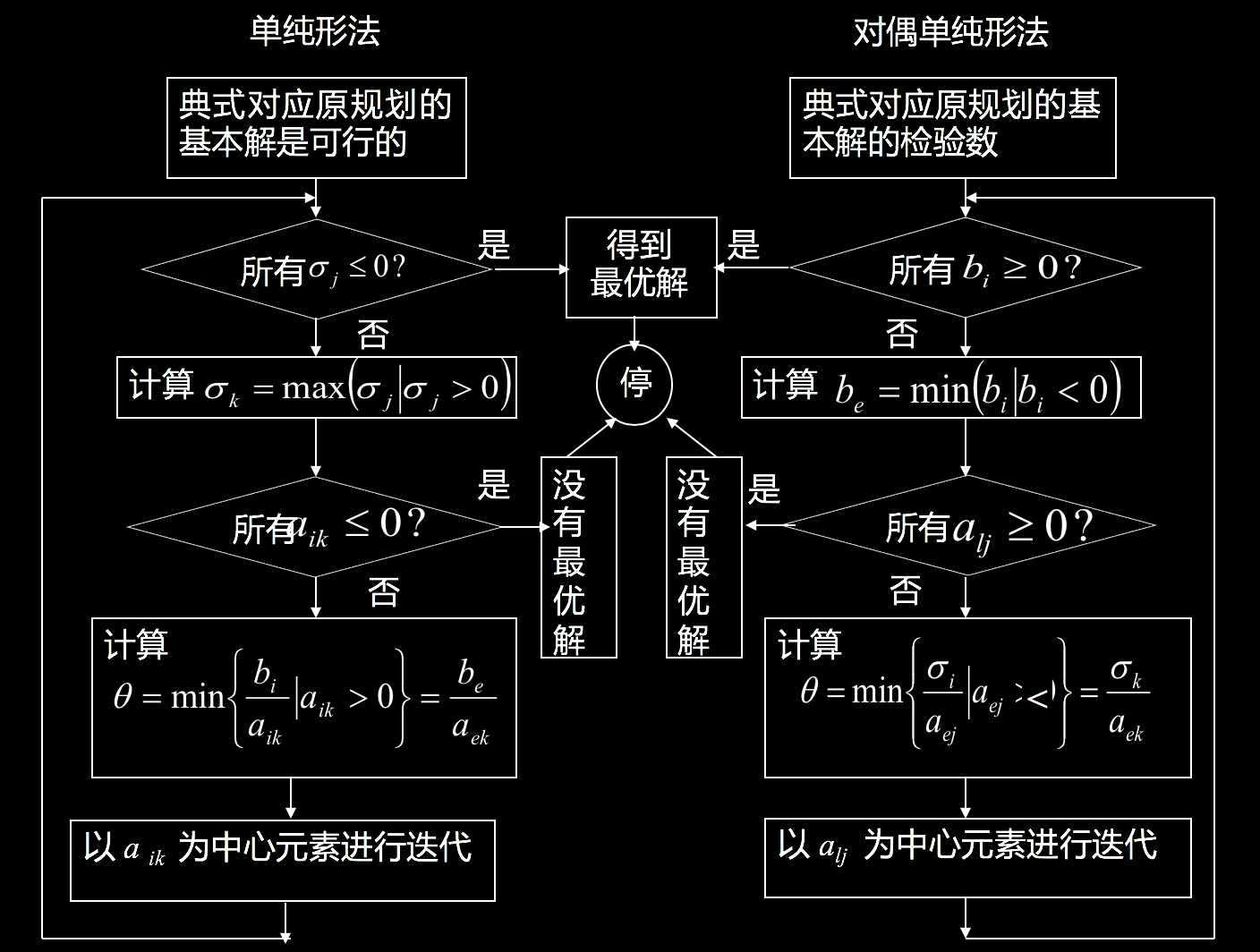
- 与单纯形法相对应的还有对偶单纯形法,二者的算法流程图对比如下所示:
4. 无约束最优化方法
4.1 最优性条件
- 一阶必要条件:如果(x^*)为局部最小点, 则(x^*)为驻点,即该点梯度为(0)。
- 二阶必要条件:如果(x^*)为局部最小点, 则该点梯度为(0),且海塞矩阵半正定。
4.2 最速下降法
- 该方法就是就是梯度下降法的雏形,是求解无约束问题(minf(x))的古老而基本的方法。
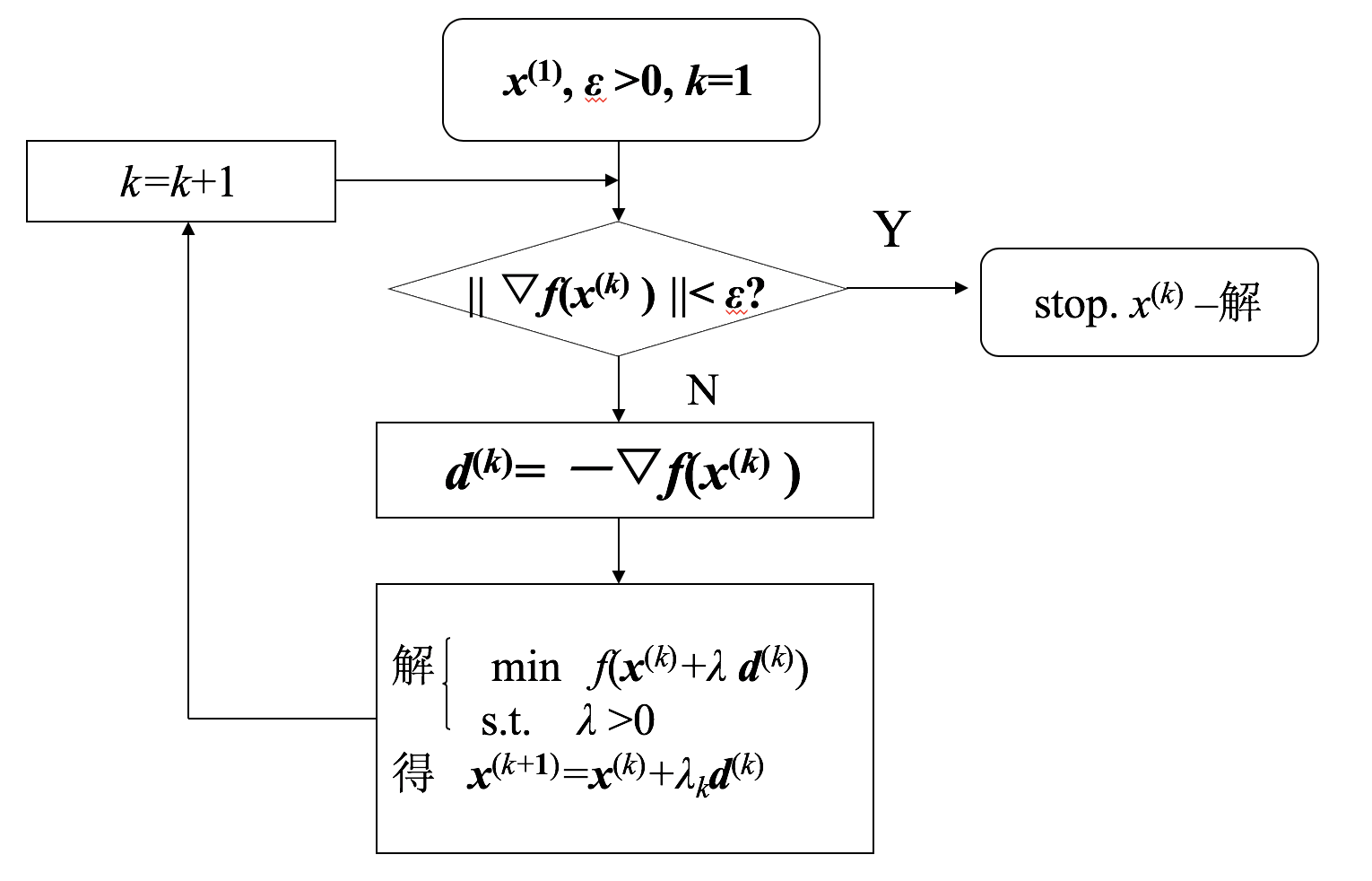
- 在迭代收敛的过程中,每一步令该点的负梯度方向为下降方向。
- 在下降方向确定后,需要找到步长(lambda),由于是单变量求最优的问题,采用一维搜索的方式即可。
- 最速下降法的“最速”是局部性质,在举例最优点较远处下降的比较快,而距离较近的时候会发生扭摆现象。
- 最速下降法是一种线性收敛的算法,在特定条件下具有全局收敛性。
- 该算法的流程图如下所示:
4.3 牛顿法
- 牛顿法的思想是利用二次函数近似目标函数,把这个二次函数的极小点作为新的迭代点。该方法应用的前提是函数(f(x))二次连续可微,并且求解的问题是无约束问题(minf(x))。
- 其数学公式由泰勒展开式取前三项得到,即二阶Taylor近似函数:
[q_k( x ) = f left( x ^ { ( k ) }
ight) +
abla f ^ { mathrm { T } } left( x ^ { ( k ) }
ight) left( x - x ^ { ( k ) }
ight) + ( 1 / 2 ) left( x - x ^ { ( k ) }
ight) ^ { mathrm { T } }
abla ^ { 2 } f left( x ^ { ( k ) }
ight) left( x - x ^ { ( k ) }
ight)
]
- (x^{(k)})是第(k)次的迭代点。
- 对该函数求驻点得到:
[
abla q_k( x )=
abla f left( x ^ { ( k ) }
ight) +
abla ^ { 2 } f left( x ^ { ( k ) }
ight) left( x - x ^ { ( k ) }
ight) = 0
]
- 显然只要计算(x^{(k)})点的梯度值,以及海塞矩阵,即可找到下一步的迭代点,相当于最速下降法中的步长为1。将上述公式转换为:
[oldsymbol { x } ^ { ( k + 1 ) } = oldsymbol { x } ^ { ( k ) } - left[
abla ^ { 2 } f left( oldsymbol { x } ^ { ( k ) }
ight)
ight] ^ { - 1 }
abla f left( oldsymbol { x } ^ { ( k ) }
ight)
]
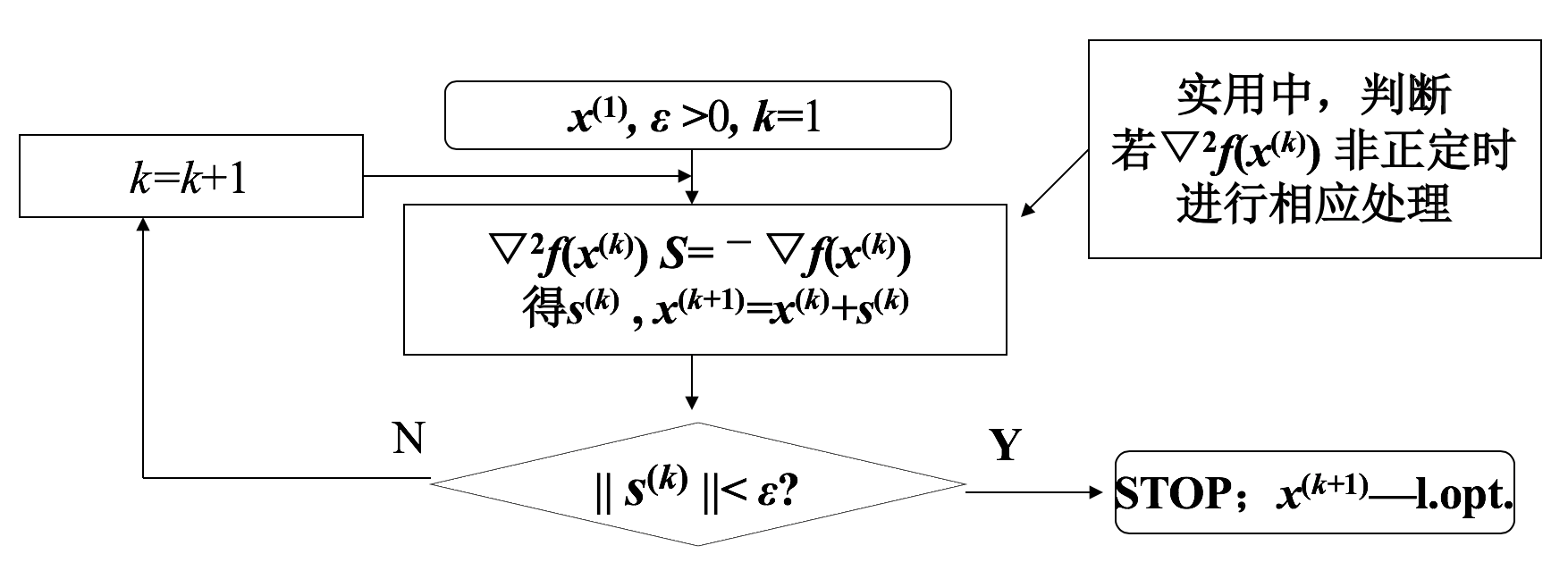
- 该公式可以进行计算的前提是海塞矩阵是正定。
- 牛顿法的算法流程图如下所示:
- 牛顿法的优点
- 牛顿法的收敛速度为二阶,属于平方收敛。牛顿法对正定二次函数一步迭代即可达到最优解,因此具有二次终结性。
- 牛顿法的缺点
- 牛顿法是局部收敛的,在初始点选择不当时,往往导致不收敛。
- 牛顿法不是下降算法,当二阶海塞矩阵非正定时,不能保证产生的方向是下降方向。
- 二阶海塞矩阵必须可逆。
- 要求函数二阶连续可微,计算量大。
5. 约束最优化方法
- 约束最优化问题是实践中常见的问题,难度大于无约束最优化问题。约束最优化问题的形式一般是((fgh))问题,即:
[( fgh ) left{ egin{array} { c } { operatorname { min } f(x)} \ { s.t. quad g ( x ) leq 0 } \ {quad quad h ( x ) = 0 } end{array}
ight.
]
5.1 Kuhn-Tucker条件
- 对于((fgh))问题,K-T条件的公式如下:
[
abla f left( x ^ { * }
ight) + sum _ { i in I } u _ { i } ^ { * }
abla g _ { i } left( x ^ { * }
ight) + sum _ { j = 1 } ^ { l } v _ { j } ^ { * }
abla h _ { j } left( x ^ { * }
ight) = 0
]
-
要求所有的(u)值非负。
-
通过对上述公式求解,便找到了满足K-T条件的K-T点。
-
在约束最优化问题中,K-T条件相当于无约束最优化问题中的驻点条件,即寻找到K-T点便找到了问题的局部最优解。
- 有些问题需要说明K-T点是全局最优解,只需要证明问题是凸规划即可,详见2.3章节的介绍。
5.2 罚函数法(外点法)
- 解决玉树问题的一个直接想法是,把违背约束作为对求最小值的一种惩罚,把约束加入到目标函数,从而得到了一个辅助的无约束最优化问题,之后采用无约束最优化方法进行求解,这就是罚函数的基本思想。
- 在实际求解无约束最优化问题时,求驻点便可以解决大多数问题。
- 构造的辅助函数形式如下:
[minf(x)+mu alpha (x)
]
-
(mu)为罚因子,大于0。
-
其中(alpha ( x ) = sum _ { i = 1 } ^ { m } phi left( g _ { i } ( x ) ight) + sum _ { j = 1 } ^ { 1 } varphi left( h _ { j } ( x ) ight))
-
通常令(phi(x)=[max{0,x}]^p), (varphi (x)=|x|^p), (p)值通常为(2)。
-
求解过程就是对辅助函数求驻点,并计算(mu)趋近无穷大时,最优解的值。
5.3 闸函数法(内点法)
- 闸函数适用于不等式约束问题,即((fg))问题。思想与罚函数基本相同。不同点在于该方法将惩罚家在约束集的边界,当靠近边界时,惩罚项无穷大。
- 构造的辅助函数形式如下:
[minf(x)+mu B(x)
]
- (mu)为罚因子,大于0。
- 其中(B ( x ) = sum _ { i = 1 } ^ { m } phi left( g _ { i } ( x ) ight))
- 通常令(phi(x)= - frac { 1 } { x })。
- 求解过程就是对辅助函数求驻点,并计算(mu)趋近(0^+)时,最优解的值。