转自:https://blog.csdn.net/dcrmg/article/details/54867507
网格(Grid)、线程块(Block)和线程(Thread)的组织关系
CUDA的软件架构由网格(Grid)、线程块(Block)和线程(Thread)组成,相当于把GPU上的计算单元分为若干(2~3)个网格,每个网格内包含若干(65535)个线程块,每个线程块包含若干(512)个线程,三者的关系如下图:
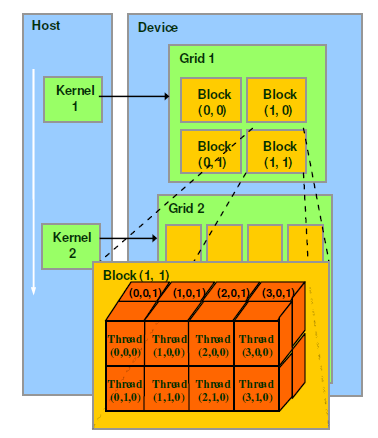
Thread,block,grid是CUDA编程上的概念,为了方便程序员软件设计,组织线程。
- thread:一个CUDA的并行程序会被以许多个threads来执行。
- block:数个threads会被群组成一个block,同一个block中的threads可以同步,也可以通过shared memory通信。
- grid:多个blocks则会再构成grid。
网格(Grid)、线程块(Block)和线程(Thread)的最大数量
CUDA中可以创建的网格数量跟GPU的计算能力有关,可创建的Grid、Block和Thread的最大数量参看以下表格:
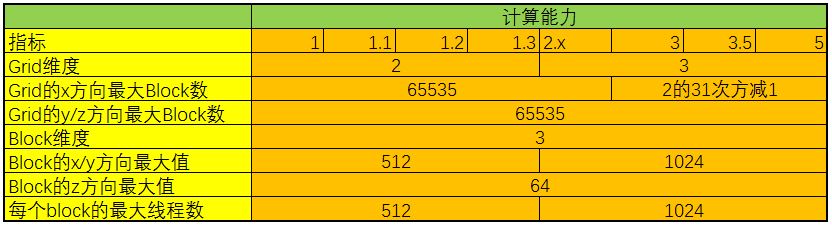
在单一维度上,程序的执行可以由多达3*65535*512=100661760(一亿)个线程并行执行,这对在CPU上创建并行线程来说是不可想象的。
线程索引的计算公式
一个Grid可以包含多个Blocks,Blocks的组织方式可以是一维的,二维或者三维的。block包含多个Threads,这些Threads的组织方式也可以是一维,二维或者三维的。
CUDA中每一个线程都有一个唯一的标识ID—ThreadIdx,这个ID随着Grid和Block的划分方式的不同而变化,这里给出Grid和Block不同划分方式下线程索引ID的计算公式。
1、 grid划分成1维,block划分为1维
int threadId = blockIdx.x *blockDim.x + threadIdx.x;
2、 grid划分成1维,block划分为2维
int threadId = blockIdx.x * blockDim.x * blockDim.y+ threadIdx.y * blockDim.x + threadIdx.x;
3、 grid划分成1维,block划分为3维
int threadId = blockIdx.x * blockDim.x * blockDim.y * blockDim.z
+ threadIdx.z * blockDim.y * blockDim.x
+ threadIdx.y * blockDim.x + threadIdx.x;
4、 grid划分成2维,block划分为1维
int blockId = blockIdx.y * gridDim.x + blockIdx.x;
int threadId = blockId * blockDim.x + threadIdx.x;
5、 grid划分成2维,block划分为2维
int blockId = blockIdx.x + blockIdx.y * gridDim.x;
int threadId = blockId * (blockDim.x * blockDim.y)
+ (threadIdx.y * blockDim.x) + threadIdx.x;
6、 grid划分成2维,block划分为3维
int blockId = blockIdx.x + blockIdx.y * gridDim.x;
int threadId = blockId * (blockDim.x * blockDim.y * blockDim.z)
+ (threadIdx.z * (blockDim.x * blockDim.y))
+ (threadIdx.y * blockDim.x) + threadIdx.x;
7、 grid划分成3维,block划分为1维
int blockId = blockIdx.x + blockIdx.y * gridDim.x
+ gridDim.x * gridDim.y * blockIdx.z;
int threadId = blockId * blockDim.x + threadIdx.x;
8、 grid划分成3维,block划分为2维
int blockId = blockIdx.x + blockIdx.y * gridDim.x
+ gridDim.x * gridDim.y * blockIdx.z;
int threadId = blockId * (blockDim.x * blockDim.y)
+ (threadIdx.y * blockDim.x) + threadIdx.x;
9、 grid划分成3维,block划分为3维
int blockId = blockIdx.x + blockIdx.y * gridDim.x
+ gridDim.x * gridDim.y * blockIdx.z;
int threadId = blockId * (blockDim.x * blockDim.y * blockDim.z)
+ (threadIdx.z * (blockDim.x * blockDim.y))
+ (threadIdx.y * blockDim.x) + threadIdx.x;