roslaunch:启动定义在launch文件中的多个节点
1.launch文件解析
<launch> #以launch标签开头以表明这是一个launch文件
#两个节点分组并以'命名空间(namespace)'标签来区分,其中一个名为turtulesim1,另一个名为turtlesim2
<group ns="turtlesim1">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<group ns="turtlesim2">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
#启动模仿节点,并将所有话题的输入和输出分别重命名为turtlesim1和turtlesim2
<node pkg="turtlesim" name="mimic" type="mimic">
<remap from="input" to="turtlesim1/turtle1"/>
<remap from="output" to="turtlesim2/turtle1"/>
</node>
</launch>
2.启动
$ roslaunch beginner_tutorials turtlemimic.launch
$ rostopic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
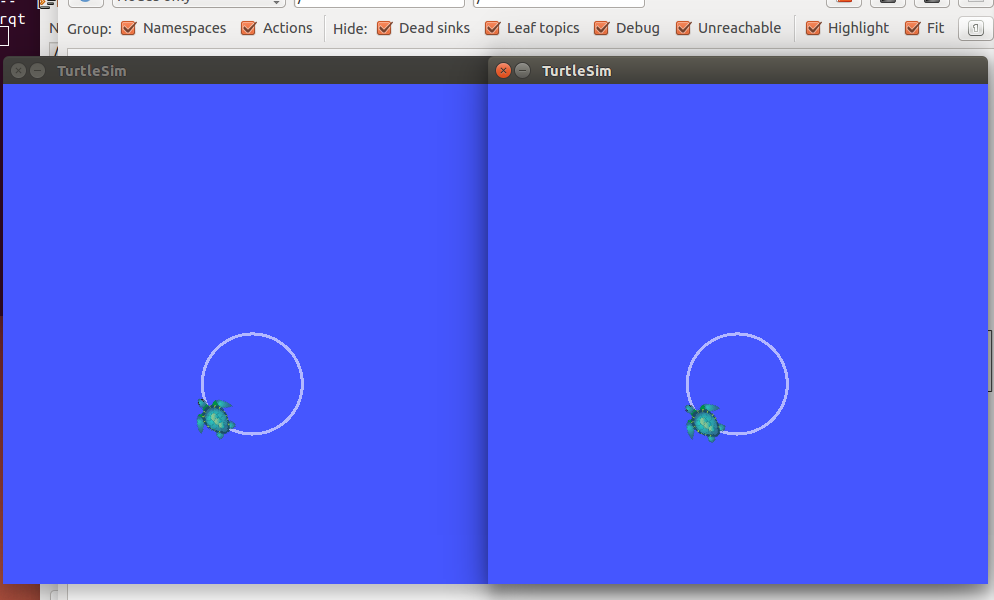
3.解析:上述程序给第一个小海龟发送了逆时针旋转运动指令,通过mimic传给了第二个小海龟