原博客地址:https://blog.csdn.net/qq_16149777/article/details/73224070
做机器人底层程序的时候,经常用到航迹推演(Odometry),无论是定位导航还是普通的方向控制。航迹推演中除了对机器人位姿进行估计,另一个很重要的关系是移动机器人前进速度、转向角速度
与左轮速度
、右轮速度
之间的转换。
在机器人局部路径规划算法DWA解析一文中,是在假设已知机器人前进线速度和角速度
的情况下,对机器人航迹推演的位姿进行推导了,然而缺少如何通过左右轮速度得到
、
,因此本文将补上这个空缺。
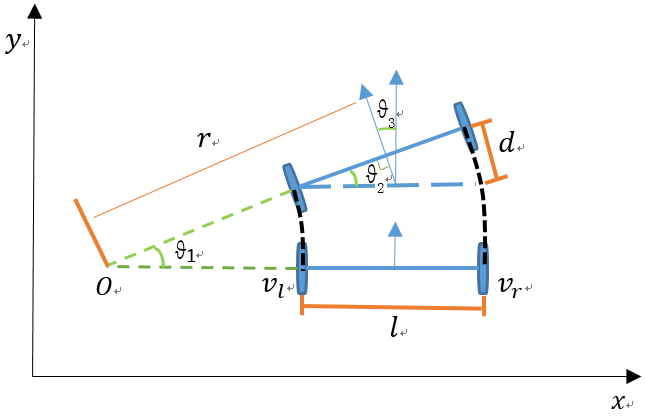
下图是移动机器人在两个相邻时刻的位姿,其中是两相邻时刻移动机器人绕圆弧运动的角度,
是两相邻时刻移动机器航向角(朝向角head)的变化量。
是左右轮之间的间距,
是右轮比左轮多走的距离。
是移动机器人圆弧运动的半径。
移动机器人前进速度等于左右轮速度的平均,这个好理解。
(1)
现在来推导机器人航向角如何计算,以及如何计算角速度。如图所示,把两个时刻的机器人位置叠加在一起,可以清楚的看到移动机器人航向角变化量是
。从图中的几何关系可以得到:
也就是说移动机器人航向角变化了多少角度,它就绕其运动轨迹的圆心旋转了多少角度。这句话很好验证,我们让机器人做圆周运动,从起点出发绕圆心一圈回到起点处,在这过程中机器人累计的航向角为360度,同时它也确实绕轨迹圆心运动了360度,说明机器人航向角变化多少度,就绕圆心旋转了多少度。而这三个角度中,很容易计算出来,由于相邻时刻时间很短,角度变化量
很小,有下面的近似公式:
所以可以得到机器人绕圆心运动的角速度,它也是机器人航向角变化的速度:
(2)
线速度、角速度都有了,因此可以推出移动机器人圆弧运动的半径:
(3)
从公式(3)可以发现当左轮速度等于右轮速度时,半径无穷大,即直线运动。最后将三个公式综合起来,可以得到左右轮速度和线速度角速度之间的关系如下,:
