主体代码文件有三个,mypcb.h,myinterupt.h, mymain.h,mypcb定义了进程控制块结构,myinterupt实现了中断处理程序,mymain是实际入口点,以下代码省去了头文件部分,并有详细注释,下面的分析中只挑选关键部分进行分析
1 /* A simply process control block */ 2 3 #define MAX_TASK_NUM 10 //max number of tasks 4 #define KERNEL_STACK_SIZE 1024*8 //max kernel stack size of a single process, here is 8KiB 5 6 //This struct describes basic CPU info 7 struct Thread 8 { 9 unsigned long ip; //EIP Register, Points to next instruction 10 unsigned long sp; //ESP Register, Points to Stack head 11 }; 12 13 //This struct describes the structure of PCB 14 typedef struct PCB 15 { 16 int pid; //pid 17 volatile long state; //process state 18 /* -1 unrunnable, 19 * 0 runnable, 20 * >0 stopped */ 21 char stack[KERNEL_STACK_SIZE]; 22 //each PCB stack size is KERNEL_STACK_SIZE, here is 8KiB 23 struct Thread thread; //CPU info 24 unsigned long task_entry; //task execute entry 25 struct PCB *next; //all processes are in a circled linked list 26 }tPCB; 27 28 void my_schedule(void);
1 #include "mypcb.h" 2 3 extern tPCB task[MAX_TASK_NUM]; 4 extern tPCB *my_current_task; 5 extern volatile int my_need_sched; 6 volatile int time_count; 7 8 /* 9 * Called by timer interrupt. 10 */ 11 void my_timer_handler(void) 12 { 13 #if 1 14 //here defines the system circle count, after that count the processes should be resheduled 15 if(time_count % 10 == 0 && my_need_sched != 1) 16 { 17 printk(KERN_NOTICE ">>>my_timer_handler here<<< "); 18 my_need_sched = 1; 19 } 20 time_count ++; 21 #endif 22 return; 23 } 24 25 void my_schedule(void) 26 { 27 tPCB *next; 28 tPCB *prev; 29 30 printk(KERN_NOTICE "This is process %d, next is process %d", my_current_task->pid, my_current_task->next->pid); 31 32 if(my_current_task == NULL || my_current_task->next == NULL) 33 { 34 return; 35 } 36 37 printk(KERN_NOTICE ">>>my_schedule<<< "); 38 39 //Scheduler code below 40 next = my_current_task->next; 41 prev = my_current_task; 42 43 //state 0 means next process is runnable 44 if(next->state == 0) // -1 unrunnable, 0 runnable, >0 stopped 45 { 46 asm volatile( 47 //saving current task scene 48 "pushl %%ebp " //save ebp, aka current scene 49 "movl %%esp, %0 "//save esp, also part of current scene 50 //changing to next task 51 "movl %2, %%esp "//set esp to the very value of next task 52 "movl $1f, %1 " //save current EIP to memory 53 "pushl %3 " //next task's EIP is now in stack 54 "ret " //reset EIP to next task's EIP, same as 'popl %eip' 55 "1: " //flag, next process start here 56 "popl %%ebp " // 57 :"=m"(prev->thread.sp), "=m"(prev->thread.ip) 58 :"m"(next->thread.sp), "m"(next->thread.ip) 59 ); 60 //The inline assembly did everything to cut the scene, now we are running 'next' task 61 my_current_task = next; 62 printk(KERN_NOTICE ">>>switch %d to %d<<< ", prev->pid, next->pid); 63 } 64 else 65 { 66 next->state = 0; 67 my_current_task = next; 68 printk(KERN_NOTICE ">>>switch %d to %d<<< ", prev->pid, next->pid); 69 //Switch to new process 70 asm volatile( 71 //Saving current task scene 72 "pushl %%ebp " //save ebp, same as above 73 "movl %%esp, %0 "//save esp, same as above 74 //Changing to next task 75 "movl %2, %%esp "//reset esp, same as above 76 "movl %2, %%ebp "//set ebp to next->thread.sp, since next task is totally new, so its stack should be empty. aka esp == ebp 77 "movl $1f, %1 " //save EIP 78 "pushl %3 " //enstack next task's EIP, same as above 79 "ret " //reset EIP, same as above 80 :"=m"(prev->thread.sp), "=m"(prev->thread.ip) 81 :"m"(next->thread.sp), "m"(next->thread.ip) 82 ); 83 } 84 return; 85 }
#include "mypcb.h" tPCB task[MAX_TASK_NUM]; tPCB *my_current_task = NULL; volatile int my_need_sched = 0; void my_process(void); void __init my_start_kernel(void) { int pid = 0; //Initializing process 0, root of everything task[pid].pid = pid; task[pid].state = 0; // -1 unrunnable, 0 runnable, >0 stopped task[pid].task_entry = task[pid].thread.ip = (unsigned long)my_process; task[pid].thread.sp = (unsigned long)&task[pid].stack[KERNEL_STACK_SIZE-1]; task[pid].next = &task[pid]; //fork more processes for(++pid; pid < MAX_TASK_NUM; ++pid) { memcpy(&task[pid], &task[0], sizeof(tPCB)); //Just a simple memcpy, copies every thing of process 0 //Reset PCB info, everything is similar as above, except this new process's state is 'unrunnable' task[pid].pid = pid; task[pid].state = -1; // -1 unrunnable, 0 runnable, >0 stopped task[pid].task_entry = task[pid].thread.ip = (unsigned long)my_process; task[pid].thread.sp = (unsigned long)&task[pid].stack[KERNEL_STACK_SIZE-1]; //Link the new process to process list task[pid].next = task[pid-1].next; task[pid-1].next = &task[pid]; } //Starting process 0 pid = 0; my_current_task = &task[pid]; asm volatile( "movl %1, %%esp " //set task[pid].thread.sp to esp "pushl %1 " //push process 0's sp to stack //Redirect EIP to entry point of process 0 "pushl %0 " //push task[pid].thread.ip "ret " //Set actuall EIP via ret "popl %%ebp " //ebp is now process0's esp, aka the process is new : :"c"(task[pid].thread.ip),"d"(task[pid].thread.sp) ); } //user process void my_process(void) { int i = 0; while(true) { ++i; if(i % 10000000 == 0) { printk(KERN_NOTICE "this is process %d - ", my_current_task->pid); if(my_need_sched == 1) { my_need_sched = 0; my_schedule(); } printk(KERN_NOTICE "this is process %d + ", my_current_task->pid); } } }
mypcb.h中定义了pcb的数据结构,每个字段都已经用注释注明含义,此处不再赘述,需要注意的是tPCB.next如何指向下一个PCB从某种程度上影响了进程调度的方式,这儿采用时间片轮转调度法,因此在后面的mymain中将所有进程连接成了一个环形链表进行调度。
mymain是入口点,从整体结构上可以看出,系统启动时首先创建了0号进程,然后由0号进程fork出了所有其他进程,这个过程很简单,不赘述,需要详细说一下的是0号进程的启动过程,代码如下
1 //Starting process 0 2 pid = 0; 3 my_current_task = &task[pid]; 4 asm volatile( 5 "movl %1, %%esp " //set task[pid].thread.sp to esp 6 "pushl %1 " //push process 0's sp to stack 7 //Redirect EIP to entry point of process 0 8 "pushl %0 " //push task[pid].thread.ip 9 "ret " //Set actuall EIP via ret 10 "popl %%ebp " //ebp is now process0's esp, aka the process is new 11 : 12 :"c"(task[pid].thread.ip),"d"(task[pid].thread.sp) 13 );
这段代码首先将0号进程设置为当前进程,接下来的汇编才真正让0号进程跑了起来
L5,将0号进程的sp保存到esp中,即将栈顶挪到了0号进程栈的栈顶,但由于0号进程此时还未运行,实际上这儿也是其栈底
L6,继续将0号进程的sp入栈作为栈底
下面几行将程序执行流真正定向到了process 0
L8,L9,我们知道ret相当于popl %eip,所以现将进程0的eip入栈然后ret,不难理解,这是将0号进程的eip值实际注入到了cpu的eip寄存器中
L10,如上面所说,当前栈顶位置储存的是0号进程的栈底,所以这句重设ebp为0号进程的栈底
这段汇编执行完成后,CPU就会根据eip指向的0号进程的入口点继续执行了
以上就是系统启动的过程,下面的my_process则是一个进程的主体,这个进程干的事情很简单,计时,达到预设时间后调用中断处理函数做好准备切换到下一个进程,代码很简单不再赘述
下面要说的myinterupt是调度器的核心,内含了中断处理函数,也就是调度器真正实现保护现场和恢复现场的部分
time_handler不难理解,计时,到达预设时间时候通知用户进程准备进行调度,不详细解释
1 //Scheduler code below 2 next = my_current_task->next; 3 prev = my_current_task; 4 5 //state 0 means next process is runnable 6 if(next->state == 0) // -1 unrunnable, 0 runnable, >0 stopped 7 { 8 asm volatile( 9 //saving current task scene 10 "pushl %%ebp " //save ebp, aka current scene 11 "movl %%esp, %0 "//save esp, also part of current scene 12 //changing to next task 13 "movl %2, %%esp "//set esp to the very value of next task 14 "movl $1f, %1 " //save current EIP to memory 15 "pushl %3 " //next task's EIP is now in stack 16 "ret " //reset EIP to next task's EIP, same as 'popl %eip' 17 "1: " //flag, next process start here 18 "popl %%ebp " // 19 :"=m"(prev->thread.sp), "=m"(prev->thread.ip) 20 :"m"(next->thread.sp), "m"(next->thread.ip) 21 ); 22 //The inline assembly did everything to cut the scene, now we are running 'next' task 23 my_current_task = next; 24 printk(KERN_NOTICE ">>>switch %d to %d<<< ", prev->pid, next->pid); 25 } 26 else 27 { 28 next->state = 0; 29 my_current_task = next; 30 printk(KERN_NOTICE ">>>switch %d to %d<<< ", prev->pid, next->pid); 31 //Switch to new process 32 asm volatile( 33 //Saving current task scene 34 "pushl %%ebp " //save ebp, same as above 35 "movl %%esp, %0 "//save esp, same as above 36 //Changing to next task 37 "movl %2, %%esp "//reset esp, same as above 38 "movl %2, %%ebp "//set ebp to next->thread.sp, since next task is totally new, so its stack should be empty. aka esp == ebp 39 "movl $1f, %1 " //save EIP 40 "pushl %3 " //enstack next task's EIP, same as above 41 "ret " //reset EIP, same as above 42 :"=m"(prev->thread.sp), "=m"(prev->thread.ip) 43 :"m"(next->thread.sp), "m"(next->thread.ip) 44 ); 45 }
调度器首先将下一个进程记为next,并将当前进程记为prev,然后需要根据下一个进程的状态来进行处理,如果下一个进程正在运行,即状态为那么执行上面这段汇编
L10,L11两行进行的就是保存当前进程运行现场,L10将栈底设置到当前栈底,L11将esp保存到了内存中,这样就完成了当前运行现场,即调用栈的保护
L13由于next处于运行状态,所以首先要恢复其运行现场,和L11相反,这行是将next的esp从内存读取到了CPU的esp寄存器中
L14将现场保护完成后的EIP,即FLAG1的地址存入prev的ip中,记录了当前运行状态以便下次恢复,L15和L16和mymain中的类似,将next的ip值送入CPU的EIP寄存器中
L17处已经完成了现场保护
L18设置了下一个进程执行时的栈底,现场切换完成,下面将当前任务设置为next就完成了进程上下文的切换
如果下一个进程并未运行,是一个新进程,处理方式则略有不同
L33,34和L10,L11并无区别,保存现场
L37同上
L38有所区别,由于下一个进程是一个新进程,所以他的栈是空的,所以直接将ebp设置为esp就可以了
后续过程和继续运行一个已运行的进程一样,没有区别,不再赘述
这样两段代码就构成了进程调度器的主体,通过设置时间片大小可以获取不同的调度效果
程序的运行效果如下
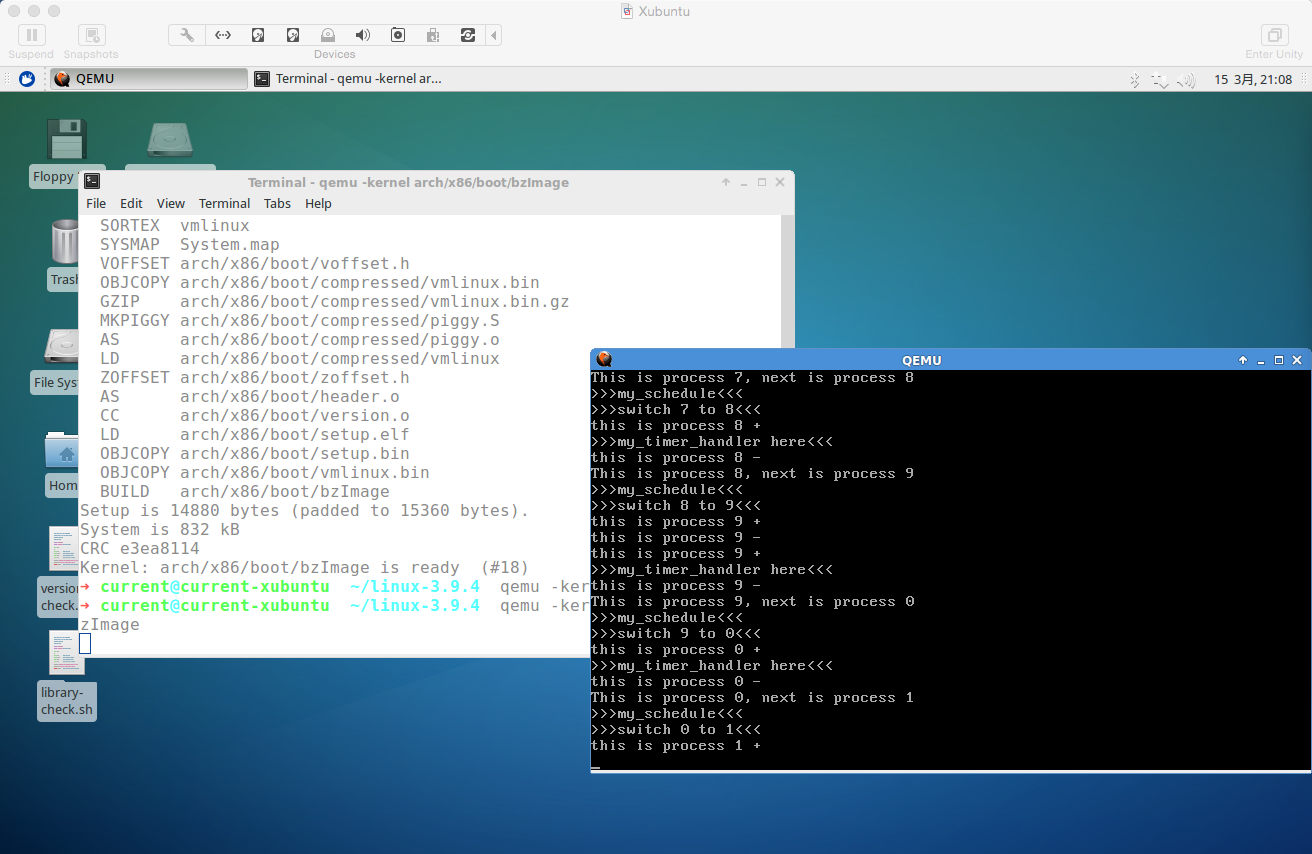
可以看见10个进程按照环形顺序依次调度运行,说明这个简单的时间片轮转调度器工作正常
从这个实验也不难理解,为什么中断和进程上下文切换是操作系统最重要的一部分功能,我们知道操作系统存在的目的是统一管理计算机的资源,并按照一定的策略分配给用户进程使用,而中断和进程上下文切换就是实现这一管理功能的手段,没有这两项功能,操作系统对计算机资源的管理也就无从谈起了
云课堂作业
吴韬 原创作品转载请注明出处 《Linux内核分析》MOOC课程http://mooc.study.163.com/course/USTC-1000029000